Here is a selected set of open-source repositories where I am the main contributor and the maintainer. For most up-to-date details please visit my GitHub page.
Working examples/tutorial for detection and pose estimation of ArUco markers with C++: fdcl-gwu/aruco-markers
This is a side project that resulted from the work published in my paper “Attitude observer on SO (3) with time-varying reference directions”. This repository provides C++ codes for basic augmented reality related tasks using computer vision. In fact, this is usually withing the first three Google results when you search for ArUco markers using C++.
Geometric controllers developed at FDCL for UAVs : fdcl-gwu/uav_geometric_control
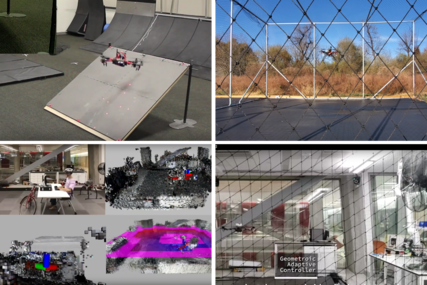
This repository includes the controller proposed in “Geometric controls of a quadrotor UAV with decoupled yaw control”. In addition, this includes both coupled-yaw and decoupled-yaw controllers in Matlab, Python, and C++ for any interested person to use in their projects.
Python - Gazebo simulation environment for a UAV with geometric control: fdcl-gwu/uav_simulator
This is another output of the work published in “Geometric controls of a quadrotor UAV with decoupled yaw control”. This includes a complete framework for simulating a UAV, which includes controller, estimator, using an open-source physics engine.
Comparison of delayed Kalman filters, with application to the state estimation of a UAV: fdcl-gwu/dkf-comparison
This work includes the results published in “Quadrotor State Estimation with IMU and Delayed Real-time Kinematic GPS”, which compares different delayed Kalman filters for their performances.